Как я собирал свой первый квадрокоптер на базе PixHawk. Как выбрать свой первый квадрокоптер
Если вы задумались о приобретении своего первого мультикоптера, то наверняка уже представляете себе, каким он должен быть. Хотя бы приблизительно.
Мы же постараемся предложить вам обзор нескольких моделей дронов, которые вы, возможно, упустили из вида, когда составляли список потенциальных кандидатов для покупки.
Самым первым кандидатом будет миниатюрный нано квадролет. Другими словами, можно просто назвать домашним. Его можно держать всего лишь двумя пальцами. А своими размерами он не на много больше спичечного коробка.
Коптер предназначен для домашних полетов. У него отсутствует защита для винтов. Это значит, что падения для него не страшны. Разве что только для его пропеллеров и для самых хрупких предметов, находящихся в вашей комнате, которые он может порубить или свалить своим ветром.
Если пользователь дрона хочет научиться летать на нем, то лучше это делать все-таки в домашних условиях. Хотя для человека, который никогда еще в своей жизни не летал на коптерах, управлять им будет тяжело, потому что мультикоптер очень маленький.
Если же дома летать не интересно, то можно попробовать полетать на улице. Единственное условие, которое нужно соблюсти, чтобы на улице не было ветра. Мощности моторов этого малыша несоизмеримы с мощностями больших коптеров, поэтому его будет постоянно сносить и опрокидывать.
Многих подкупает то, что у этого квадрокоптера очень маленькая аппаратура управления. На это не стоит вестись, потому что она очень неудобная в плане использования. Единственный ее плюс в компактности, но управлять ею не очень неудобно. Лучше купить нормальных размеров пульт управления.
Следующими кандидатами являются дроны, размером в 10 сантиметров. На них уже появляются видеокамеры, но толку от этих камер не много. Качество записи просто ужасное, потому что разрешение камер очень мало — до двух мегапикселей. Бывают еще не только квадрокоптеры, но даже и гексакоптеры. Этих сразу можно отнести в сторонку, потому что шесть винтов для малыша — это слишком много.
У этой категории моделей уже есть защита для пропеллеров. На них можно свободно летать дома и висеть. Можно, не боясь нанести серьезный урон домашнему интерьеру, потренироваться, прежде чем выйти для первого запуска на улицу.
Кстати об улице. Такие коптеры, несмотря на свои маленькие размеры, больше подходят для полетов именно там. Потому что они неплохо чувствуют себя во время ветра. Отлично развивают скорость, и вы, как пилот, получите огромное удовольствие от управления ими.
Здесь стоит предупредить покупателей. Прежде чем покупать такой миниатюрный квадролет, поищите отзывы и обзоры в интернете. Будучи одинаковыми снаружи, они летают по-разному.
Подойдут ли такие дроны для новичков? Нет, потому что размеры маленькие. Уже на расстоянии пяти метров пользователь может потерять ориентир и не понять, где у дрона передняя часть, а где задняя. Мы бы приобрели этот дрон, если бы уже научились летать на других моделях. А эти квадролеты предназначены для веселья.
Аппараты средних размеров (15-20 сантиметров)
У этих квадролетов коллекторные моторы. Как известно, такой вид двигателей долго не живет, поэтому придется запастись запасными двигателями. На этих моделях установлены камеры. На некоторых установлен даже режим FPV. Но опять же, качество видео здесь ни о чем.
Ужасное качество, особенно во время полета по камере, постоянные задержки, пропадание сигнала и так далее. Пилот может первое время побаловаться с видео, но потом он просто сам снимет эти камеры и будет летать без них.
Летать на таких квадрокоптерах уже проще. Их лучше видно и новичок сможет легко определять, где находится его нос, а где тыл. Эти квадролеты более стабильные и отлично зависают в воздухе. То есть для начинающего пилота такой вариант был бы идеальным.
Дома тренироваться смысла нет, потому что размеры дронов немаленькие. Лучше сразу начинать учиться на улице — там пилот не ограничен ничем, он может падать, разгоняться, улетать.
На большинстве средних беспилотниках можно повисеть в воздухе. Но если вы желаете не только зависать над землей, но еще и быстро летать, и делать различные флипы, то, опять же, не все они подойдут для этих целей. В этом случае снова смотрите обзоры и читайте рецензии на такие квадролеты.
Говоря про специальные моды этих дронов, можно отметить, что все эти примочки типа «следовать за пилотом» и «возврат в автоматическом режиме» — самые настоящие сказки. Они плохо работают и на них не стоит тратить свое время.
Для полетов и съемок
Обращаем внимание, прежде всего, на цены. Обычные дроны этой категории стоят от двухсот долларов. Все оснащены бесколлекторными моторами. Готовы к полету сразу же после распаковки из коробки.
Эти модели оснащены GPS системами. Они могут зависать над землей, возвращаться назад без особых проблем и при этом не сбиваться с курса. Поэтому, если я новичок, то лучше приобрету солидный коптер.
Сначала управлять им будет, конечно же, страшно, но вы быстро освоитесь. Отпустив стики в нейтральное положение, вы заставите дрон зависнуть на месте. Если он улетел куда-то от вас, то нажатием всего лишь одной кнопки вы сможете вернуть его обратно в режиме автопилота. Какой бы стороной не был повернут дрон к вам в этот момент, он все равно вернется на место старта.
Все, что нужно сделать — это изучить инструкцию к применению, правильно настроить GPS и компас. Потому что дроны такого калибра иногда улетают нереально далеко.
Если же вы хотите снимать и при этом не тратить больших денег, то можете остановить свой выбор на квадрокоптерах средней категории. Снять с них родные камеры и даже привесить вместо них камеры Гоу-Про. Однако следует помнить, что эти дроны с коллекторными моторами. От сильных нагрузок моторы будут сгорать и падать. Не сразу, но довольно быстро.
Мультикоптеры с бесколлекторными двигателями прослужат долго и качество съемки будет намного лучше и качественнее, к тому же они безопаснее.
Все остальные: маленькие, средние и домашние только чтобы получить удовольствие от управления летающей модели. На них можно тренироваться, веселить друзей и летать дома зимой.

В первую очередь новичку нужно выбирать !
Квадрокоптер у начинающего пилота, будет неизбежно падать и врезаться в препятствия. А так как дрон, вещь довольно хрупкая, ваши деньги будут потрачены впустую.
На что еще нужно смотреть при выборе квадрокоптера для начинающего? Существуют шесть основных возможностей и функций, на которые стоит обратить внимание в первую очередь:
Время полёта . Это время которое дрон будет летать на одном заряде аккумулятора. Обычно производители указывают максимальное время, то есть без камеры, без защиты винтов, без ножек для приземления и в хорошую безветренную погоду. Совет: покупайте сразу дополнительные аккумуляторы.

Скорость полета

Радиус контроля

Наличие камеры

Способ управления

Возврат домой
Также стоить обратить внимание на еще несколько особенностей:
- Простой и удобный пульт управления
- Крашеустойчивость
- Небольшой размер
- Наличие режимов для новичка
- Хорошая стабилизация.
К сожалению нет квадрокоптера который бы обладал всеми перечисленными характеристиками. Но производители стараются, и каждый год на рынке появляются новые модели с функциями и ценой доступной каждому.
Управление
Пульт управления (аппаратура, трансмиттер)
![]()
Пульт не должен иметь много кнопок, что бы не путать новичка. А размер пульта должен совпадать по размерам и форме с джойстиками популярных игровых приставок.
Крашеустойчивость

Начинающий не имея опыта полетов на квадрокоптерах неизбежно будет ронять его и врезаться в препятствия. Поэтому крашеустойчивость должна быть высокой.
Небольшой размер

При столкновение с препятствиями размер квадрокоптера будет сильно влиять на последствия краша. Малый размер сведет их к минимуму, как для окружающих так и для самого дрона.
Режимы для новичка

Например наличие режима Headless позволяет управлять квадрокоптером независимо от его положения в воздухе (передом или задом к пилоту). Так же есть функция возврата домой (RTH), при нажатии кнопки дрон летит в направлении пульта.
Хорошая стабилизация

Наличие четырех или шести осевого гироскопа позволит квадрокоптеру стабильнее держаться в воздухе, а новичку избежать краша при мелких ошибках в управлении.
| Название | Наличие камеры | Время полета | FPV | Удержание высоты | Headless режим | Цена | Обзор |
|---|---|---|---|---|---|---|---|
| | нет | 10 мин. | нет | нет | да | 32$ | |
 | да | 7-9 мин. | нет | нет | да | 60$ | |
 | да | 7 мин. | нет | нет | нет | 27$ | |
| | нет | 10 мин. | нет | нет | да | 61$ | |
 | да | 12 мин. | WiFi | нет | да | 52$ |
Новое рождение мультикоптеры получили в XXI веке , уже как беспилотные аппараты . Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании . Мультикоптеры удобны для недорогой аэрофото- и киносъёмки - громоздкая камера вынесена из зоны действия винтов [ ] .
Модель транспортного средства-гексакоптера

Октокоптер для персональных полётов
Принцип действия [ | ]
По принципу управления мультикоптеры бывают :
- автономные
- дистанционно-управляемые (беспилотные)
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса , в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина - против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты - подъём;
- ускорить винты с одной стороны и замедлить с другой - движение в сторону;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против - поворот.
Существуют также трёх- и пятивинтовые вертолёты (- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом - так и осуществляется поворот аппарата вокруг своей оси . Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах , однако они не получили какого-либо распространения.
По вариантам размещения винтов в отношении оси движения и в зависимости от их направления вращения различают несколько типов мультикоптеров:
Современное применение мультикоптеров [ | ]
Современное применение мультикоптеров весьма разнообразно: от игрушек, доставки товаров, любительских средств для фото- и видеосъёмки до пассажирских и грузовых транспортных средств и боевых роботов .
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии . Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор .
Это накладывает определённые ограничения на их полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30-50 минут у уникальных единичных экземпляров). Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности - от 500 г до 2-3 кг, что позволяет поднять в воздух небольшую фото или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных). Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6-8 (гекса и октокоптеры), способные поднять в воздух груз массой до 20-30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах. Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100-110 км/ч. Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7-12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100-200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее. Для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10-15 км при высоте полёта 1-2 км.

Квадрокоптер визуального контроля окружающего пространства для силовых структур «Грифон-41»

Экспериментальный квадрокоптер «Ehang 184»

Прототип волокоптера «2X»
Безопасность полётов [ | ]
В отличие от самолёта, который способен планировать с выключенным двигателем, или вертолёта, который способен сесть с помощью авторотации , мультикоптер при отключении моторов или электропитания, полностью неуправляем. Квадрокоптер при отказе одного из двигателей может сохранять стабилизацию. Гексакоптер или октокоптер помимо этого могут совершить мягкую посадку с одним неработающим мотором, однако не во всех случаях (например, при разрыве хотя бы одной лопасти вибрация из-за дисбаланса увеличивается настолько, что контроллер перестаёт работать, и аппарат переходит в неуправляемое падение). Но уже существуют экспериментальные квадрокоптеры, которые могут стабилизировать полёт и совершить посадку при потере одного из двигателей .
Учитывая то, что мультикоптер имеет немалую массу, жёсткий корпус и быстро вращающиеся пропеллеры, его столкновение с людьми или автотранспортом может привести к негативным последствиям. Поэтому полёты над людьми или автодорогами не рекомендуются. Желательно планировать траекторию полёта так, чтобы в случае необходимости (например, при разрядке батареи) внизу было место для безопасной посадки.
Важен и человеческий фактор. Современный полётный контроллер по сложности настройки и количеству полётных режимов почти не уступает настольному компьютеру. Невнимательное чтение документации, отсутствие выполнения необходимых действий (например, калибровки компаса при настройке) могут привести к неуправляемому полёту и потере аппарата. Вылет аппарата за радиус действия пульта при отсутствии режима GPS-возврата также является одной из причин потерь аппаратов.
В целях безопасности некоторые модели дистанционно управляемых мультикоптеров оборудуют дублирующими системами навигации и позиционирования, элементами интеллектуальной роботизации способствующими самостоятельному определению летательным аппаратом препятствии на маршруте полёта и их облёту, защитными кожухами винтов или всего летательного аппарата, самостоятельным возвратом к месту пуска при утере сигнала управления .
Мультикоптеры-игрушки [ | ]
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата около 40 г), в то же время, позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам.

Трикоптер
![]()
Квадрокоптер «Robbe Blue Arrow Nano Loop»

Миниквадрокоптер с пультом управления

Октокоптер в полёте
Мне захотелось собрать что-то посложнее. Например, что-то летающее. Оказалось, что авиамоделизм — это просто огромное направление. Собирают и самолеты, и вертолеты, и мультикоптеры. Если взять даже одни только мультикоптеры, то их десяток разных видов помножить на разные размеры и решаемые задачи (гонки, фотосъемка, полеты по GPS, …). Было решено начать с классического квадрокоптера среднего размера с возможностью дальнейшего апгрейда. В общем, чтобы можно было со всем немного поиграться.
С чего начать
Ниже я не стану подробно описывать из чего обычно состоит квадрокоптер или на какие характеристики двигателей, пропеллеров, регуляторов скорости и прочих частей следует обращать внимание. Во-первых, эта тема на несколько довольно больших статей. Во-вторых, об этом уже написаны хорошие статьи и даже несколько книг. Лично я прочитал следующие книги:
Эти книги оказались вполне взаимозаменяемыми. Можете прочитать одну любую из них. Также рекомендую серию статей о квадрокоптерах на сайте customelectronics.ru, это суммарно где-то 70 страниц в A4.
Ознакомившись с теорией, имеет смысл полетать по квартире, а затем и на улице, на готовом дешевом мини-квадрокоптере типа Syma X12S Nano . Мини-дроны практически неубиваемые и, в отличие от более крупных DIY дронов, их можно запускать в доме. Упражнения на них позволят вам выработать моторику для управления квадрокоптером, поднакопить опыта, и избежать аварий в будущем. Когда я первый раз запускал такой мини-квадрокоптер, его через пару минут унесло за крышу стоящего рядом двухэтажного дома, где он пропал из зоны видимости и разбился. К счастью, потом я умудрился его найти и ему ничего не было. Но было бы обидно и крайне небезопасно для людей / машин / окон поблизости, если бы это был куда более тяжелый и дорогой DIY дрон!
Заметьте, что в разных странах разное законодательство в отношении того, где и когда можно летать, требуется ли регистрация дронов, и так далее. Если вы живете в Москве, обратите внимание, что территория внутри МКАД является бесполетной зоной. Чтобы спокойно полетать и при этом вас гарантированно никто не трогал, лучше всего вообще выехать куда-нибудь загород. Кстати, мини-дронов это не касается. В общем, ознакомьтесь с местным законодательством. Далее на этом вопросе я предпочитаю не останавливаться, так как законы в отношении дронов, ровно как и соблюдение людьми этих законов на практике, везде разные.
Интересно, что названные выше книги уже сейчас заметно устарели, и еще сильнее устареют к моменту, когда вы будете читать эти строки. В мире авиамоделизма новые (более легкие, надежные и дешевые) компоненты появляются достаточно быстро. Поэтому прежде, чем приступить к сборке своего дрона, крайне рекомендую посетить тематический форум и спросить там совета по подбору компонентов. Я лично затусил на forum.rcdesign.ru . Там есть специальная тема Вопросы новичка , в которой на первых порах рекомендуется задавать все вопросы, пока вы не освоитесь на форуме.
Само собой разумеется, вам понадобятся хотя бы базовые знания электроники. Если вы уже во всю паяете DIY проекты на базе какой-нибудь Arduino , значит у вас все хорошо. Если это не так, поиграйтесь для начала с Arduino. Или же, если вам все это не интересно, рассмотрите вариант покупки готового квадрокоптера , например, от компании DJI. Готовые квадрокоптеры стоят примерно столько же, сколько аналогичные DIY дроны. Однако в плане возможности апгрейда, доступности запчастей, получаемого в процессе опыта, да и общего фана DIY дроны субъективно на порядок интереснее.
Список покупок
Все компоненты для квадрокоптера были куплены в магазинах air-hobby.ru и realrc.ru, поэтому ссылки из следующего списка ведут на них. Те же компоненты могут быть куплены на AliExpress несколько дешевле, но придется ждать доставки из Китая. Обычно она занимает 1-2 месяца. Большинство компонентов мне подсказали на уже упомянутом forum.rcdesign.ru.
Fun fact! На самом деле, это второй квадрокоптер, который я пытался собрать. Первый не полетел. Дело в том, что я старался следовать рекомендациям из упомянутых выше книг, но из-за отсутствия опыта не учел ряд тонких моментов. Выбрал устаревшие передатчик с приемником, умеющие только PWM , старую тяжелую раму, уже устаревший полетный контроллер MultiWii, и моторы, которые вообще не предназначены для использования к квадрокоптерах. Перед покупкой чего-либо настоятельно рекомендую проконсультироваться у опытных авиамоделистов на тематических форумах!
На вопросе что к чему подключается подробно останавливаться не буду. Там нет ничего сложного и в упомянутых книгах все подробно расписано. Если вы что-то подзабыли, все вопросы легко гуглятся. Например, если вы не помните, куда ставятся CW, а куда CCW моторы, вот, пожалуйста, . Если не уверены, куда ESC подключаются к PixHawk, ответ есть в официальной документации . Кроме того, по любому вопросу есть видео на YouTube, а если что-то все равно не понятно, можно спросить на форуме.
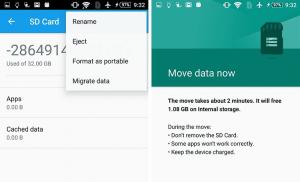
Касаемо настройки PixHawk. Для Windows есть Mission Planner . Для Linux — APM Planner , притом он даже есть в AUR, если вдруг вы пользуетесь Arch Linux на десктопе . Если APM Planner чем-то не подошел, еще есть QGroundControl . Он также работает под MacOS и Android. Настройка элементарная — открываете Initial Setup и по очереди производите настройку в каждом разделе. Программа подробно описывает, что и как нужно делать.
Внешний вид APM Planner (кликабельно, PNG, 606 Кб):
А так выглядит мой квадрокоптер в собранном виде:

Перед первым полетом обязательно убедитесь, что вы (1) откалибровали акселерометр и компас, (2) откалибровали передатчик, (3) откалибровали каналы на стороне полетного контроллера, (4) откалибровали ESC. Моторы к раме и пропеллеры к моторам прикручивайте как можно сильнее. Перед полетом включите квадрокоптер без пропеллеров и убедитесь, что все моторы крутятся (1) в правильную сторону, (2) с одинаковой скоростью и (3) адекватно реагируют на команды с передатчика.
Важно! Очень опасно включать квадрокоптер с пропеллерами дома. Из-за небольшого увеличения throttle дрон может оторваться от пола и улететь прямо в потолок. Крайне не рекомендуется так делать!
Кажется, это все, что я хотел сказать в этом разделе.
Что дальше?
Выше была описана, так сказать, самая базовая модель квадрокоптера, который еще очень долго можно апгрейдить. Много возможностей открывает добавление GPS. Например, удержание позиции и высоты, режим follow me, автоматические полеты по заранее построенному маршруту, автоматический возврат к точке взлета (RTL), и так далее. Другое направление — это фото- и видео-съемка, а также полеты от первого лица (FPV). И это еще не считая добавления подсветки, ультразвукового датчика HC-SR04 (для более точного определения высоты при взлете и посадке), GSM-модуля
А увлекаетесь ли вы авиамоделизмом, и в частности квадрокоптерами? Если да, то на чем сейчас летаете?
Добрый день.
В качестве первой радиоуправляемой воздушной модели я всем рекомендую именно квадрокоптер. Его устойчивость зависит от настройки электроники, надежность заключается в правильной пайке нескольких деталей и выборе регуляторов\двигателей. Так же хочется отметить его универсальность управления: с одной стороны в полете он очень похож на вертолет (вертикальная посадка и взлет, сбрасывание тягой скорости), с другой на самолет (несколько иная, отличная от вертолета модель поведения в воздухе), стоимость эксплуатации и живучесть при падениях. Навыки которые вы получите, облегчат переход на другие типы летательных аппаратов.
Какова цена билета в мир моделизма для новичка или что купить чтобы полететь на первом квадрокоптере?
Первым делом стоит кинуть в корзину RC-аппаратуру и зарядное устройство.
Модели будут меняться, падать, теряться и ремонтироваться, но эти две вещи останутся на долгие годы. Для начала будет вполне достаточно купить:
Передатчик (2000р
) и (900р
). Передатчик в продаже достаточно долго, все его болячки найдены, успешно лечатся статьями на форумах + руками, а с процессом модернизации справится даже школьник. Комплектуется средненькой штатной прошивкой(легко меняется) и приемником на 8 каналов, которых для начала хватит за глаза. Зарядку стоит брать только оригинал.
Так же если вы уверенны в своих силах и располагаете лишней тысячей рублей, стоит попробовать начать с новой (1800р
) + передающий модуль (1300р
). Но все же я рекомендую для начала взять старую добрую модель. Ещё одна очень важная деталь это , не вздумайте выходить на взлет без 10-15 часов налета на симуляторе.
Цена: 2000р\3100р + 900р
Выбор рамы будующего ЛА.
Тут стоит остановиться на потребностях...
1.Для простых учебных полетов стоит брать небольшую пластиковую раму:
- (330р ) - небольшая рама, прочный пластик, очень компактные размеры, яркая окраска.
- (430р ) - неубиваемый пластик + встроенная плата разводки.
- (610р ) - рама чуть побольше функционалом(дополнительные этажи) + шарик поможет ориентироваться в положении импровизированного носа.
- (1150р ) - алюминиевые лучи, наличие колпака, мягкие стойки возможность использования только "конфигурации +"
- (1150р ) - складная рама!, алюминиевые лучи, многоярусность базы, мягкие стойки, возможность использования только "конфигурации х"
- (3000р ) - складная углепластиковая рама, наличие колпака и мягких шасси, но высокая цена неприямлима для новичка. брать только в том случа если уверенны на 100% в том, что берете для съемок с воздуха при больших нагрузках на раму.
- (700р ) - алюминиевые лучи, крепление для камеры, мягкие высокие стойки и конечно же низкая цена. из минусов пожалуй только отсутсвие колпака и небольшое количество ярусов базы.
Двигатель выбираем из потребностей в тяге. В идеале полетный вес должен быть в районе 2\3 от максимальной тяги для fpv и в 1\2 для пилотажных квадрокоптеров. Тягу расчитывать ориентировочно, по мощности: 100Вт мощности = 0.5 кг тяги и не забывайте что двигателей у вас аж четыре.
- 300Вт (630р ) - разработан специально для мультироторных систем
- 250Вт (570р ) - отлично сбалансированный мотор. отдельно стоит купить адаптер.
- 350Вт (500р ) - мощный, отлично сбалансированный мотор. у самого такой стоит на FPV квадрокоптере.
- - 100Вт (250р ) - маленький колокольчик. идеально для небольших моделей начального уровня. маленькая цена, низкий "об\в" и вес.
- 180Вт (400р ) - проверенный многоми колокольчик. простой. надежный. дешевый и достаточно мощный.
- Turnigy MultiStar (250р ), (320р ), (400р ), (630р )
- Hobbyking Blue Series (260р ) (340р ), (380р ), (620р )
Пропеллер для мультироторов бюджетной сферы однозначно надо покупать винты серии SF !двухлопастные!(КПД у двухлопастных винтов выше чем у трехлопастных), они намного лучше реализуют грузоподъемность при низких оборотах, легко разрушаются при контакте с поверхностью и стоят относительно других винтов очень дешево. Какой же винт выбрать по диаметру? Чем больше мощность - тем больше винт. Не поскупитесь и возьмите побольше комплектов (для начала хватит 20-24 винтов). Винты это основная статья расходов в эксплуатации мультикоптеров.
- 100-150Вт 8x4.5 правого( и ) и левого ( и ) вращения или комплект 2R+2L , пропеллеров.
- 150-200Вт 10x4.5 правого( и ) и левого ( и ) вращения или комплект 2R+2L , пропеллеров.
- 200-350Вт 12x4.5 правого( и ) и левого( и ) вращения или комплект 2R+2L , пропеллеров.
Выбор контроллера стабилизации.
- (500р ) - очень дешевая маленькая плата, стандартная прошивка "квадрокоптер схемы +", легко настраивать отверткой прямо в поле, стабильность и качество плавают от партии к партии. Если и стоит брать, то только ради учебных полетов.
- (1000р ) - из плюсов сразу хочется выделить наличие экрана, который очень сильно упрощает настройку в поле, постоянное допиливание прошивок (на данный момент версия 1.5), вот видео о том что может эта плата.
- (2500р ) присутствие GPS, барометра, "возврата домой" и "удержания на точке" позволили мгновенно завоевать популярность этой плате. Для FPV идеальное решение.
- Темные лошадки от фирмы MultiWii: (730р ), (1200р ) и (1500 ). Вроде и цены хорошие для таких возможностей и USB порт для програмирования, но они не так популярны и как следсвие болячки их не изучены. С одной стороны вы можете получить отличную плату за небольшие деньги, с другой нарваться на брак и быть разочарованным в моделизме.
Комплектующие необходимые для сборки мультироторной системы.
- Аккумулятор выбираем таким образом, чтобы его емкости хватило примерно на 10 минут полета. Допустим мотор в среднем потребляет 5А, а их у нас четыре, следовательно вся система в среднем будет потреблять 20А, теперь этот ток делим на!6! и получаем цифру емкости аккумулятора для 10 минут полета. Для этого примера 3.3 А\ч. Линека с стоимостью аккумуляторов 3s 20С: