Шим регулятор оборотов двигателя с обратной связью. ШИМ-регулятор. Широтно-импульсная модуляция. Схема. Принцип работы ШИМ регулятора
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы , речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
На рис.1 приведена схема одного из таких ШИМ-регуляторов . Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
![]()
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
![]()
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555 . Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
![]()
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя - R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б - КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Добрый вечер, друзья! Это первый мой в жизни обзор чего-либо, поэтому готов с радостью выслушать критику и советы.
Товар покупался за свои кровные. Подробности ниже.
К заказу этого регулятора, меня натолкнул уважаемого kirich . Поэтому, я сначала заказал точно такой же ШИМ регулятор, но потом для разнообразия закал и героя сегодняшнего обзора.
Заказ был сделан 29 октября, а ко мне в подмосковную Лобню он добрался только 3 декабря. Товар был упакован в стандартный пакетик с пупырками и обильно обмотан поролоном:
Упаковка

В комплекте только сама плата управления и переменный резистор на 100 кОм, который подключается непосредственно к плате разъемом HU-3 с длиной проводов 19 см, что вполне удобно для монтажа.

Пропайка силовых дорожек мне показалась просто ужасной. Не думал, что наши азиатские друзья буду экономить на припое. Также видно множество следов неотмытого флюса. Возможно это я такой везунчик:


На гуру пайки я не претендую, поэтому решил исправить немного ситуацию. Думаю если бы кому-то пришла плата после моих рук, от китайцев не особо отличили:


Регулятор построен на таймере NE555P, поэтому я думаю не имеет смысла рассказывать про всю схему, да и боюсь пока не хватит для этого знаний =).

Рабочий диапазон напряжения 12-60 Вольт и максимальный ток 20 Ампер. Кстати на одном из фото виден плавкий предохранитель номиналом на 20 Ампер, что по идее должно спасать от превышения номинального тока.
А теперь проверим его в работе. В качестве питания буду использовать старый БП от ноутбука на 19 Вольт и 4.74 Ампера, а мотор от какого-то шуроповерта на 18 Вольт:

Видео самой работы. Прошу прощения за небольшую тряску, т.к. снимал на телефон, а штатива для этого дела не имею:
Покупать или нет - дело каждого. Я покупал его для мини сверлильного станка, который надеюсь начать собирать в наступающем году. Конечно, в сети полно схем на эту тематику, но мне пока как новичку захотелось готового решения.
Всем спасибо за внимание, жду Ваших замечаний!
Вместо котэ

Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
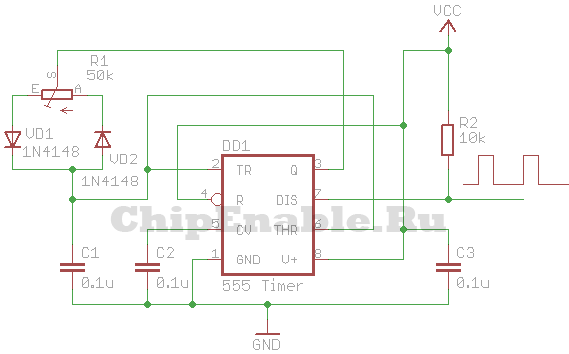
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
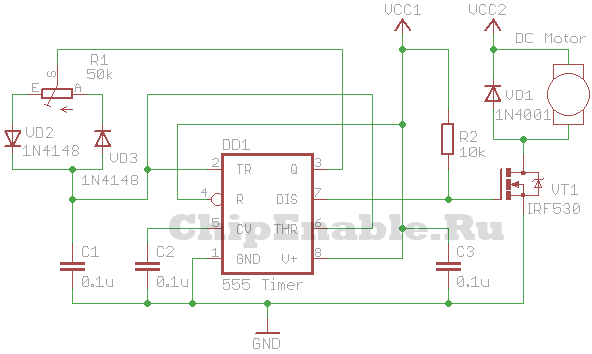
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
С аналоговым интегральным таймером SE555/NE555 (КР1006), выпускаемым компанией Signetics Corporation с далекого 1971 года прекрасно знакомо большинство советских и зарубежных радиолюбителей. Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.
Предлагаемая Jericho Uno простенькая схемка автомобильного ШИМ-регулятора – не профессиональная, полностью отлаженная разработка, отличающаяся своей безопасностью и надежностью. Это всего лишь небольшой дешевый эксперимент, собранный на доступных бюджетных деталях и вполне удовлетворяющий минимальным требованиям. Поэтому его разработчик не берет на себя ответственности за все то, что может произойти с вашим оборудованием при эксплуатации смоделированной схемы.
Схема ШИМ регулятор на NE555
Для создания ШИМ-устройства вам понадобится:- электропаяльник;
- микросхема NE555;
- переменный резистор на 100 кОм;
- резисторы на 47 Ом и 1 кОм по 0,5W;
- конденсатор на 0,1 мкФ;
- два диода 1N4148 (КД522Б).
Пошаговая сборка аналоговой схемы
Построение цепи начинаем с установки перемычек на микросхему. Используя паяльник, замыкаем между собой следующие контакты таймера: 2 и 6, 4 и 8.
Дальше, руководствуясь направлением движения электронов, распаиваем на переменном резисторе «плечи» диодного моста (проход тока в одну сторону). Номиналы диодов подобраны из имеющихся в наличие, недорогих. Можно заменить их любыми другими – это практически не повлияет на работу схемы.

Во избежание короткого замыкания и перегорания микросхемы при выкручивании переменного резистора в крайнее положение, ставим по питанию шунтирующее сопротивление в 1 кОм (контакты 7-8).

Поскольку NE555 выступает в роли генератора пилы, для получения схемы с заданной частотой, длительностью импульса и паузой, осталось подобрать резистор и конденсатор. Неслышных 18 кГц нам даст конденсатор 4,7 нФ, но такое малое значение емкости вызовет перекос плеч при работе микросхемы. Ставим оптимальную в 0,1 мкФ (контакты 1-2).

Избежать противного «пищания» схемы и подтянуть выход к высокому уровню можно чем-то низкоомным, например резистором 47-51 Ом.

Осталось подключить питание и нагрузку. Схема рассчитана на входное напряжение бортовой сети автомобиля 12V постоянного тока, но для наглядной демонстрации вполне запустится и от 9V батареи. Подключаем ее на вход микросхемы, соблюдая полярность (плюс на 8 ножку, минус на 1 ножку).

Осталось разобраться с нагрузкой. Как видно из графика, при понижении переменным резистором выходного напряжения до 6V пила на выходе (ножки 1-3) сохранилась, то есть NE555 в данной схеме и генератор пилы и компаратор одновременно. Ваш таймер работает в а-стабильном режиме и имеет коэффициент заполнения меньше 50%.

Модуль выдерживает 6-9 А проходного постоянного тока, так что при минимальных потерях можно подключить к нему как светодиодную полосу в автомобиле, так и маломощный двигатель, который и дым развеет и лицо в жару обдует. Примерно так:


Или так:


Принцип работы ШИМ регулятора
Работа ШИМ регулятора достаточно проста. Таймер NE555 отслеживает напряжение на емкости С. При ее заряде до достижения максимума (полный заряд) происходит открывание внутреннего транзистора и появлению логического нуля на выходе. Далее емкость разряжается, что приводит к закрытию транзистора и приходу к выходу логической единицы. При полном разряде емкости происходит переключение системы и все повторяется. В момент заряда ток идет по одному плечу, а при разряде – по-другому. Переменным резистором мы меняем соотношение сопротивления плеч, автоматически понижая либо увеличивая напряжение на выходе. В схеме наблюдается частичное отклонение частоты, но в слышимый диапазон она не попадает.Смотирте видео работы ШИМ регулятора
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты , в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:

Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:

Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Изготовление самодельных реле
 Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:

 В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
 В продаже можно найти различные типы микроконтроллеров
, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
В продаже можно найти различные типы микроконтроллеров
, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.