1с обмен данными изменение сопоставления объектов. Сравнение объектов в JavaScript. Обработка "Сопоставление и исправление объектов"
Когда правила конвертации свойств и значений созданы, можно указать принципы сопоставления (поиска) объектов по их свойствам. Если говорить упрощенно, то пока мы умеем сообщать системе какой тип в какой должен преобразовываться. Например, документ "Реализация товаров и услуг" в источнике должен преобразовываться в документ "Реализация товаров и услуг" в приемнике. Но пока не знаем как системе сообщить, что документ в источнике "Реализация товаров и услуг" c номером 0001 и датой 01.01.2008 должен заменять документ в приемнике "Реализация товаров и услуг" с тем же номером.
Нам нужно сообщить программе принципы поиска соответствующих объектов в приемнике. Это делается очень просто. Для свойств, по которым необходимо производить поиск объектов для их изменения, необходимо установить флажок поиск в соответствующем правиле конвертации свойств. Это можно сделать самостоятельно для каждого типа объектов. Если поиск установлен по нескольким реквизитам, то в информационной базе приемнике объект будет искаться на совпадение всем реквизитам объекта источника (то есть условия поиска объединяются логической операцией "И").
Программа позволяет автоматически указать поля, по которым рекомендует выполнять поиск объектов.
Достаточно перейти на закладку "Поиск объектов в приемнике" и программа предложит установить поиск по определенным свойствам.
При нажатии на кнопку "Установить правила поиска" программа установит поиск по выбранным свойствам.
Если все необходимые правила конвертации объектов, свойств и значений созданы, установлены поля поиска объектов, то практически все готово к тому, что бы воспользоваться правилами и выполнить обмен данными между информационными базами.
Сопоставление объектов в конфигурациях на базе конфигурации "Библиотека стандартных подсистем" (БСП).
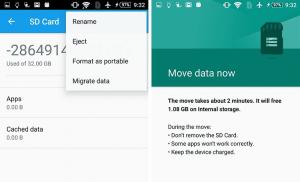
Сопоставление объектов в обменивающихся конфигурациях на базе БСП имеет свои особенности. Для сопоставления объектов используется специальный инструмент – помощник интерактивного обмена данными, который позволяет выполнять сопоставление в автоматическом, полуавтоматическом и в ручном режиме.
Поля поиска влияют на отображение полей в таблице сопоставления объектов в помощнике интерактивного обмена данными – порядок полей в таблице сопоставления помощника совпадает с порядком полей поиска в правиле конвертации объектов. Отдельно следует отметить тот факт, что в таблице сопоставления помощника одновременно может быть отображено не более пяти полей. Отсюда рекомендация – количество полей поиска следует задавать не большим пяти.
В режиме автоматического сопоставления объектов система сначала выполняет сопоставление по уникальным идентификаторам ссылок. Для объектов, для которых сопоставление по уникальным идентификаторам не дало положительного результата, выполняется сопоставление по всем полям поиска, которые указаны в правиле конвертации.
В полуавтоматическом режиме сопоставления объектов, пользователь может изменять набор полей сопоставления.
С уважением, Владимир Милькин (преподаватель и разработчик ).
Экспертное оценивание при попарном сопоставлении рассматриваемых объектов осуществляют, если количество объектов четное. При этом предпочтение эксперта выражается указанием номера предпочтительного объекта в соответствующей графе таблицы сопоставления, как это показано, например, для шести объектов в табл. 9.1.
Таблица 9.1
Результаты попарного сопоставления объектов экспертом
| Номер объекта -> экспертизы | Количество предпочтений i -го объекта, N i | ||||||
| X | |||||||
| X | |||||||
| X | |||||||
| X | |||||||
| X | |||||||
| X |
Максимально возможное число предпочтений любого из рассматриваемых объектов, полученное от одного из экспертов, равно
![]() ,
,
где т – количество оцениваемых объектов.
Частота этих предпочтений F i находится как частное от деления N i на N max , т.е.

Используя данные табл. 9.1, получаем N max = 6 - 1 = 5 , а частоты предпочтений, данные экспертом, равны:
![]() ;
; ![]() ;
; ![]() ;
;
![]() ; ;
; ;
Общее число суждений одного эксперта С , связанное с количеством объектов экспертизы т, находят из соотношения
![]()
При шести объектах экспертизы ![]()
Определенный одним экспертом показатель i -го объекта или весомость по сравнению с другими объектами рассчитывают по формуле:

где n – количество экспертов; т - число оцениваемых показателей; Q i , j – коэффициент весомости j -го показателя в рангах (баллах), который дал i -й эксперт.
Преобразованной к виду:
 ,
,
где п – число экспертов в группе.
Пусть число экспертов в группе равно пяти и их оценки о F i . сведены в табл. 9.2.
Таблица 9.2
Частоты предпочтений объектов, данные экспертами
| Номера экспертов | ||||||
| F 1 | F 2 | F 3 | F 4 | F 5 | F 6 | |
| 0,8 | 0,6 | 0,4 | 0,2 | 1,0 | ||
| 0,7 | 0,7 | 0,4 | 0,3 | 0,9 | 0,1 | |
| 0,8 | 0,5 | 0,5 | 0,3 | 1,0 | 0,1 | |
| 0,9 | 0,5 | 0,6 | 0,2 | 0,8 | ||
| 0,8 | 0,5 | 0,5 | 0,2 | 0,9 | ||
| Итого | 4,0 | 2,8 | 2,4 | 1,2 | 4,5 | 0,2 |
Вданном случае результаты экспертизы по определению показателей объектов таковы:
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]()
Найдем сумму значений показателей весомости:
Этот результат свидетельствует о том, что показатели оценены экспертами достаточно точно. Поэтому, очевидно, что итоговый ранжированный ряд объектов рассмотрения поих показателями имеет вид:
№ 6 < № 4 < № 3 < № 2 < № 1 < № 5
Если сумма показателей весомости существенно отличается от 1, то, чтобы увеличить достоверность оценивания, проводят повторное сопоставление объектов, используя для этого свободную часть таблицы попарного сопоставления. При этом повторное сопоставление производят в хаотическом порядке. В таком случае каждая пара объектов сопоставляется дважды. Такое полное или двойное сопоставление объектов существенно уменьшает случайные ошибки оценок экспертов. Следовательно, двойное сопоставление обладает более высокой достоверностью, чем однократное.
Пусть после двойного сопоставления и установления предпочтений получены результаты оценок одного эксперта представленные в табл. 9.3.
Таблица 9.3
Результаты двойного попарного сопоставления объектов экспертом
| Номер объекта -> экспертизы | Количество предпочтений i -го объекта, N i | ||||||
| X | |||||||
| X | |||||||
| X | |||||||
| X | 3,5 | ||||||
| X | |||||||
| X | 0,5 |
Примечание: если сопоставляемые объекты одинаковы, равны между собой, то это обозначается цифрой 0, но обоим объектам дается по 0,5 предпочтения.
Возможное наибольшее количество предпочтений одного объекта равно
![]() ,
,
а частота предпочтений

По данным табл. 9.3 находим, что при N max = 10
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]()
Показатели оцениваемых объектов находим по формуле,
,
где п – число экспертов в группе.
при условии, что в случае двойного попарного сопоставления количество возможных суждений одного эксперта равно С = т(т - 1) . В рассматриваемом нами примере С = 6(6 - 1) = 30 . Поэтому «усредненные» показатели оцениваемых объектов таковы:
Полученные результаты являются приведенными значениями оценок фактического, реального попарного сопоставления рассматриваемых объектов.
Сумма значений всех показателей равна:
Ранжированный ряд объектов, составленный по оценкам первого эксперта, такой:
Q 6 < Q 3 < Q 4 < Q 2 < Q 1 < Q 5
Если, например, остальные четыре эксперта дали оценки такие же, как приведены в табл. 9.2, то в табл. 9.4 будет изменена, по сравнению с табл. 9.2, только первая строка.
Таблица 9.4
Свод частот предпочтений объектов
| Номера экспертов | Частоты предпочтений объектов | |||||
| F 1 | F 2 | F 3 | F 4 | F 5 | F 6 | |
| 0,7 | 0,6 | 0,3 | 0,35 | 0,8 | 0,05 | |
| 0,7 | 0,7 | 0,4 | 0,3 | 0,9 | 0,1 | |
| 0,8 | 0,5 | 0,5 | 0,3 | 1,0 | 0,1 | |
| 0,9 | 0,5 | 0,6 | 0,2 | 0,8 | ||
| 0,8 | 0,5 | 0,5 | 0,2 | 0,9 | ||
| Итого | 3,9 | 2,8 | 2,3 | 1,35 | 4,4 | 0,25 |
Итоговый результат экспертизы всех экспертов, рассчитываемый по формуле:
,
где п – число экспертов в группе.
в данном примере будет таким:
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]()
Сумма всех показателей весомости или значимости (качества) равна:
Следовательно, ранжированный ряд по данным экспертизы имеет вид:
Q 6 < Q 4 < Q 3 < Q 2 < Q 1 < Q 5
Таким образом получают результаты экспертизы при двойном попарном сопоставлении оцениваемых объектов.
10. Метод оценки уровня качества разнородной продукции.
Под разнородной продукцией понимают совокупность изделий, предназначенных для достижения единой производственной цели. Это могут быть разнообразные технологические машины, составляющие технологический комплекс или систему машин производственного процесса. Кроме того, если предприятие выпускает несколько типов изделий, то оно создает разнородную продукцию.
Для оценки уровня качества разнородной продукции используются индексы качества.
Под индексом качества продукции понимают комплексный показатель уровня качества разнородной продукции, равный относительному значению средних взвешенных показателей качеств всех видов оцениваемой и базовой продукции.
Основным показателем, применяемым при комплексной оценке уровня качества разнородной продукции, является относительный средний взвешенный арифметический индекс качества - И к U :
 ,
,
где s и м – число различных видов оцениваемой и базовой продукции;
И – коэффициенты весомости n -го оцениваемого и k- гобазового вида продукции;
К оц и К баз – комплексные показатели совокупностей свойств соответствующих образцов оцениваемой и базовой продукций.
Коэффициенты весомости определяют по формулам:
 ;
;  ,
,
где и –стоимости отдельных образцов продукции n -го и к -говидов сходной, но разнородной продукции.
Другим показателем качества, также применяемым при комплексной оценке уровня качества производимой разнородной продукции, является средний взвешенный геометрический индекс качества , определяемый по формуле:
 ,
,
где – относительный показатель качества n -го вида продукции, определяемый дифференциальным методом, т.е.
; (n=1, …, N) ,
где Р n – главный единичный или комплексный показатель качества n -го вида продукции; Р пбаз – базовый показатель качества n -го вида продукции; N –число производимых видов продукции; – относительный объем продукции n -го вида, т.е. коэффициент весомости.
Коэффициент весомости определяют так:
 , , ,
, , ,
где – планируемый или реальный объем выпуска продукции n -го вида в денежном выражении (в отпускных, оптовых ценах).
Для штучной продукции
 ,
,
где – количество изделий n -го вида продукции;
Ц n – отпускная цена n -го вида продукции.
В тех случаях, когда на предприятии выпускается продукция нескольких сортов, то за относительный показатель качества продукции (К п )принимается коэффициент сортности (К с ), определяемый как отношение фактической стоимости продукции в оптовых ценах к условной стоимости, т.е. к стоимости при условии, что вся продукция будет выпущена высшим сортом.
Для упрощения расчетов вместо среднего взвешенного геометрического индекса можно применять средний взвешенный арифметический индекс качества, но только тогда, когда усредняемые исходные относительные показатели качества сравнительно мало отличаются друг от друга.
Индекс дефектности И д – это комплексный показатель разнородной продукции, который может быть использован для оценки уровня качества изготовления продукции, выпущенной за рассматриваемый интервал времени. Он равен среднему взвешенному коэффициентов дефектности оцениваемой продукции:
 ,
,
где – коэффициент дефектности продукции n -го вида, являющийся показателем качества изготовления данной продукции, N –число видов оцениваемой разнородной продукции, – коэффициент весомости данного вида продукции.
Рассмотрим пример 1.
Приведена классификация дефектов при заключительной проверке производства автомобилей и испытаний их в дорожных условиях.
1. Критические дефекты (ноль дефектов на 100 машин):
топливные течи; течи в системе охлаждения; течи в системе смазки; утечка тормозной жидкости; снижение уровня охлаждающей жидкости; не работает ножной тормоз; тугое или разболтанное рулевое управление и т.п.
2. Значительные дефекты (15 дефектов на 100 машин):
сцепление пробуксовывает, включается рывками; неисправность датчика давления; неисправность датчика температуры; перегрев всех частей трансмиссии; не работает вся система освещения; стеклоочистители не работают и т.п.
3. Малозначительные дефекты (150 дефектов на 100 машин):
необычный шум в двигателе; выход из строя свечей зажигания; не работает звуковой сигнал и т.п.
4. Низкозначительные дефекты (400 дефектов на 100 машин):
дефекты металлических листов покрытия; дефекты покраски; дефекты отделки; подъемные скобы плохо установлены и т.п.
Коэффициент дефектности определяют при выборочном (или полном) инспекционном контроле готовой продукции. Он является характеристикой средних потерь, вызванных дефектами, приходящихся на единицу определенного вида продукции, и равен:
 ,
,
здесь n – число проверенных экземпляров продукции (объем выборки);
т –число всех видов дефектов, встречающихся в данной продукции при выборке;
– количество дефектов i -го вида;
j i – коэффициент весомости i -го вида дефектов (в долях затрат или баллах).
При серийном производстве учетные данные технического контроля для n единиц проверенной продукции за определенный промежуток времени группируются по одноименным видам и для группы подсчитывается их число S i . Коэффициенты весомости дефектов определяются стоимостным (или балльным) способом.
Определить коэффициент дефектности (R д ) и уровень качества изготовления У k для велосипеда при стоимости его изготовления С = 870 руб. и объеме выборки п = 30 шт.
Исходные данные для расчета (R д ) приведены в таблице.
| № п/п | Шифр дефекта | Коэффициент весомости, , руб. | Число дефектов, т i | S i = |
| 0,03 | 4,26 | |||
| 0,21 | 1,47 | |||
| 0,10 | 0,40 | |||
| 20,00 | 240,00 | |||
| 3,04 | 395,20 | |||
| 0,02 | 0,54 |
 .
.
По данным таблицы определяют коэффициент дефективности
![]() .
.
При стоимостном способе определения коэффициентов весомости дефектов уровень качества изготовления определяется по формуле:
![]() .
.
Индексы дефектности и коэффициенты дефектности продукции рекомендуется использовать при оценке технического уровня продукции в крупных, структурно-сложных объединениях предприятий – в фирмах, ассоциациях и т.п.
Литература
1. Азгальдов Г.Г. Теория и практика оценки качества товаров (основы квалиметрии). – М.: Экономика, 1982. – 256 с.
2. Афанасьев П.П., Вититин В.Ф., Голубев С. Оценка качества машиностроительной продукции: Учеб. пособие / Под ред. И.С. Голубева. – М.: Изд-во МАИ, 1995. – 76 с.
3. Калейчик М.М. Квалиметрия: Учебное пособие. М.: Изд-во МГИУ, 2006. – 200 с.
4. Квалиметрическая экспертиза. Руководство по организации экспертизы и выполнению квалиметрических расчетов. В 3-х кн. / Под ред. В.М. Маругина и Г.Г. Азгальдова. – СПб., М.: «Русский регист», 2002. – 517 с.
5. Рыжаков В.В., Моисеев В.Б., Пятирублевый Л.Г. Основы оценивания качества продукции: Учебное пособие. – Пенза: Изд-во Пенз. технол. ин-та, 2001. – 308 с.
6. Федюкин В.К. Основы квалиметрии. Управление качеством продукции. Учебное пособие. М.: Информационно-издательский дом «Филинъ», 2004. – 296 с.
7. Фомин В.Н. Квалиметрия. Управление качеством. Сертификация. Учебное пособие. – М.: 2005. – 384 с.
ГЛОССАРИЙ
| Базовое значение показателя свойства продукции – значение показателя свойства продукции, принятое за основу при сравнительной оценке качества продукции |
| Базовые образцы – образцы продукции, представляющие передовые научно-технические достижения в развитии данного вида продукции |
| Валидизация – подтверждение на основе объективных данных того, что требования по конкретному использованию или применению выполнены |
| Величина – значение, количественная характеристика размера |
| Верификация – подтверждение на основе представления объективных свидетельств того, что установленные требования выполнены |
| Вид продукции – совокупность образцов продукции одного назначения и области применения |
| Допуск – это допустимая разность между верхним (наибольшим) и нижним (наименьшим) предельными значениями размеров. Характеризуется величиной, в пределах которой может колебаться размер детали или другого изделия, сохраняя заданные эксплуатационные характеристики |
| Допускаемое отклонение показателя свойства продукции – отклонение фактического значения показателя свойства продукции от его номинального значения, но находящееся в пределах, установленных нормативной документацией |
| Единица измерения – условная величина, по сравнению с которой определяют значение (величину) размера |
| Единица физической величины или физическая единица измерения – это физическая величина фиксированного размера, условно принятая для сравнения с ней однородных величин, которой присваивается числовое значение, равное 1. Например: 1 м – единица длины, 1 кг – единица веса, 1 с – единица времени и др. |
| Единичный показатель – характеризует одно из свойств продукции и обозначается буквой Р |
| Измерение – определение количественного значения (величины) физического размера с помощью эталонных измерительных средств. Следовательно, измеряются с помощью какой-либо меры только физические размеры и при этом определяются их физические величины. Измеряемый размер и его численная величина объективны. Погрешность измерения регламентируема и выявляема |
| Индекс качества продукции – комплексный показатель качества разнородной продукции, выпущенной за рассматриваемый интервал времени, равный среднему взвешенному относительных значений показателей качества всех видов выпускаемой продукции |
| Индивидуальный показатель качества объекта – безотносительное численное значение совокупности свойств или важнейшего свойства, принимаемое за количественную характеристику его сущности |
| Интегральный показатель качества продукции – это отношение суммарного показателя эффекта от эксплуатации или потребления продукции к суммарным затратам на ее создание и эксплуатацию или потребление |
| Калибровка – это специальный тип измерений, выполняемый с целью установления отношения между измеряемыми размерами и известным размером калибра |
| КАЧЕСТВО – атрибут, определенная сущность объекта, показателем которой является совокупная (обобщенная) характеристика всех его свойств и признаков |
| Качество продукции – степень соответствия присущих характеристик свойств установленным требованиям |
| Квалитет – это степень точности геометрических размеров (характеризуемая величиной допуска, выраженного в микрометрах) для установленного количества номинальных размеров |
| Квалификация – демонстрация способности выполнять установленные требования |
| Количественное оценивание – определение численных характеристик размеров (физических и нефизических) без использования материальных средств. Погрешность оценивания не регламентируется, но она может быть рассчитана |
| Комплексный показатель свойств продукции – показатель, характеризующий несколько ее свойств (К ) |
| Контроль– процедура оценивания соответствия продукции, процесса или услуги требованиям путем наблюдения, измерения, испытания или калибровкой |
| Коэффициент весомости показателя свойства продукции – количественная характеристика значимости данного показателя свойства продукции среди других показателей свойств |
| Нефизическая величина – величина нематериального размера, оцениваемая неинструментальными методами, а также величина размера нематериального объекта или его особенностей (аспектов, свойств). Физическими величинами являются численные значения, например, массы тела, его объема, температуры, скорости движения и т.д. Нефизическими величинами оценивается ум, знания; честность, безопасность, привлекательность, эстетичность и т.п. |
| Номинальное значение показателя – регламентированное значение показателя, от которого отсчитывается допускаемое отклонение |
| Номинальный размер – это размер, который служит началом отсчета отклонений и относительно которого определяются предельные размеры |
| Обобщенный показатель свойств (Q ) – это комплексный среднеарифметический или среднегеометрический показатель, характеризующий несколько близких по значимости (весомости) свойств (параметров) |
| Объективное свидетельство – данные, подтверждающие наличие или истинность чего-либо. Объективное свидетельство может быть получено путем наблюдения, измерения, испытания или другими способами |
| Определяющий показатель продукции – показатель свойства, по которому принимают решение оценивать качество продукции |
| Оптимальное значение показателя качества – значение показателя качества продукции, при котором достигается либо наибольший эффект от эксплуатации или потребления продукции при заданных затратах на ее создание и эксплуатацию или потребление, либо заданный эффект при наименьших затратах, либо наибольшее отношение эффекта к затратам |
| Отклонение размера – это алгебраическая разность между действительным (наибольшим или наименьшим) и соответствующим номинальным размером |
| Относительное значение показателей свойств – отношение значения показателя свойства оцениваемой продукции к базовому значению этого показателя |
| Оценивание бывает: 1) количественно неопределенным, т.е. по содержанию, по сути (часто такое оценивание называют «качественным»); 2) количественным или квалиметрическим |
| Оценка технического уровня продукции – совокупность операций, включающая выбор номенклатуры показателей, характеризующих техническое совершенство оцениваемой продукции, определение значений этих показателей и сопоставление их с базовыми |
| Оценка уровня качества продукции – совокупность операций, включающая выбор номенклатуры показателей свойств оцениваемой продукции, определение значений этих показателей и сопоставление их с базовыми |
| Параметр – величина частной составляющей измеренной физической величины. Например, при измерении напряжения переменного электрического тока его амплитуду и частоту рассматривают как параметры напряжения. Другой пример. Обычно при производстве продукции измеряют ее основные параметры - величины свойств, по которым осуществляют параметрический контроль качества. Следовательно, физические величины свойств объекта можно назвать параметрами |
| Показатель – это численное значение размера, по которому можно судить о состоянии, изменении или развитии чего-либо |
| Показатель качества продукции – численное значение степени (уровня) соответствия совокупного показателя свойств оцениваемой продукции аналогичному показателю эталонного или базового образца |
| Показатель свойств продукции – количественная характеристика одного или нескольких свойств продукции, входящих в ее качество, рассматриваемая применительно к определенным условиям ее создания и эксплуатации или потребления |
| Предельное значение показателя – наибольшее или наименьшее регламентированное значение показателя продукции |
| Размер – свойство количественной определенности объекта и его свойств. Размеры и, следовательно, их величины бывают физическими и нефизическими. Размер характеризуется размерностью и выражается количеством единиц соответствующей размерности. Так называемые «безразличные» величины по сути дела имеют размерности такие, как кг/кг, м/м, руб./руб. и т.д. |
| Размерность – указатель рода величины в соответствующих единицах измерений |
| Ранг – это уже некоторая безразмерная количественная характеристика, т.е. численный показатель того, что первоначально было оценено только качественно и представлено в последовательном ряду шкалы порядка |
| Регламентированное значение показателя – установленное нормативной документацией |
| Свойство – это особенность, некоторое проявление сущности (природы) объекта |
| Свойство продукции – объективная особенность продукции, которая может проявляться при ее создании, эксплуатации или потреблении |
| Сертификация продукции - это разновидность оценки качества продукции, состоящая в определении соответствия данной продукции установленным требованиям конкретного стандарта или другого нормативного документа |
| Средний взвешенный арифметический показатель совокупности свойств (U ) является суммарным комплексным показателем, учитывающим весомость каждого из единичных (абсолютных или относительных, удельных) показателей свойств |
| Средний взвешенный геометрический показатель (К ) есть комплексный показатель совокупности свойств продукции, учитывающий взаимовлияние параметров значимости весомости всех входящих в него показателей свойств |
| Технический уровень (ТУ) продукции – относительная характеристика качества продукции, основанная на сопоставлении значений показателей, характеризующих техническое совершенство оцениваемой продукции с базовыми значениями соответствующих показателей |
| Техническое совершенство (ТС) продукции – совокупность наиболее существенных свойств продукции, определяющих ее качество и характеризующих научно-технические достижения в развитии данного вида продукции |
| Требование – потребность или ожидание, которое установлено, обычно предполагается или является обязательным |
| Уровень качества продукции – итоговая относительная характеристика качества продукции, основанная на сравнении значений показателей качества оцениваемой продукции с базовыми значениями соответствующих показателей |
| Физическая величина – количественная характеристика размера конкретного свойства материального объекта (предмета, процесса или явления), измеряемая физическими единицами измерений |
| Шкала – это упорядоченный ряд отметок, соответствующий соотношению последовательных значений измеряемых величин |
Печать (Ctrl+P)
Механизм сопоставления данных при обмене через универсальный формат
Механизм сопоставления данных предназначен для решения задачи синхронизации данных между базой источника и базой приемника при обмене
Внутренние идентификаторы объектов
В идеальном случае данные синхронизируемых приложений могли бы сопоставляться по уникальным внутренним идентификаторам объектов (GUID). Но для этого необходимо, чтобы добавление данных, подлежащих синхронизации, осуществлялся только в одном приложении, а в другом эти данные появлялись исключительно в результате синхронизации. В этом случае GUID в двух приложениях у одинаковых объектов будут одинаковыми, и по ним можно будет однозначно сопоставить объекты.
На практике соблюдать данное требование не всегда возможно, особенно в случае настройки синхронизации между приложениями, работа в которых велась независимо. Это связано с тем, что у двух одинаковых объектов, созданных параллельно в каждом приложении, будет два разных GUID.
В некоторых случаях данные не могут быть сопоставлены по GUID по причине его отсутствия (особые случаи, которые не рассматриваются в данной статье).
Публичные идентификаторы объектов
Для успешного сопоставления объектов с разными GUID должно быть место для хранения информация об их соответствии. Таким местом является регистр сведений Публичные идентификаторы синхронизируемых объектов (далее РПИ ).
Рис. 1 Регистр сведений Публичные идентификаторы синхронизируемых объектов
Структура регистра представлена в таблице:
Для сопоставления данных двух программ предназначена в БСП 2.3 обработка “Сопоставление объектов информационных баз” для непосредственного использования при синхронизации данных
 Рис 2. Основная форма обработки “Сопоставление объектов информационных баз”
Рис 2. Основная форма обработки “Сопоставление объектов информационных баз”
Список открывается по команде Выполнить сопоставление на странице Сопоставление данных Помощника интерактивной синхронизации данных. Также можно дважды щелкнуть мышью по строке, в которой обнаружены проблемы сопоставления данных.
Список состоит из двух колонок, каждая из которых соответствует информационной базе, участвующей в обмене. Данные сгруппированы по объектам программы (документы, списки). В нижней части списка выводится информационная строка: сколько элементов сопоставлено, сколько не сопоставлено.
В поле Выводить можно выбрать, какие данные показывать в списке. По умолчанию выводятся Несопоставленные данные .
Сопоставление объектов
- Нажмите Сопоставить автоматически (рекомендуется), выберите поля для сопоставления с помощью флажков. Некоторые поля выбраны программой по умолчанию. Для того чтобы подтвердить свой выбор, нажмите Выполнить сопоставление . После поиска программа выводит на просмотр сопоставленные ею данные. Для подтверждения нажмите Применить .
- После автоматического сопоставления можно оставшиеся объекты сопоставить вручную или изменить сопоставление объектов. Выделите нужные объекты двух баз, нажмите Отменить соответствие , для того чтобы попытаться сопоставить объекты вручную, нажмите Установить соответствие для того чтобы сопоставить объекты.
- Для подтверждения нажмите Записать и закрыть .
Настройка полей таблицы сопоставления
- Нажмите Колонки , чтобы добавить поля в колонки списка. С помощью флажков можно отметить дополнительные поля, для подтверждения нажмите Применить .
Получение данных из другой программы
Порядок сопоставления объектов
- Рекомендуется выполнять сопоставление и загрузку данных с учетом ссылочных связей. Особенно, если поле используется для сопоставления объектов.
- Например, в конфигурации имеется справочник договоров контрагентов, который подчинен справочнику контрагентов. Сопоставление договоров контрагентов выполняется по справочнику-владельцу, т.е. по справочнику контрагентов. Следовательно, для правильного сопоставления данных необходимо сначала сопоставить и загрузить справочник контрагентов, а затем – справочник договоров контрагентов.
- В противном случае поля таблицы сопоставления могут содержать фиктивные ссылки вида:
<Объект не найден> (26:a0b9001b24e002fe11dfba347dd41412). - Фиктивная ссылка указывает на объект в текущей информационной базе, который еще не был загружен из сообщения обмена.
Записи в РПИ создаются и на стороне отправителя при подтверждении получения данных корреспондентом через механизм квитирования. В поле Идентификатор в таких записях устанавливается исходный идентификатор объекта. Регистрация таких записей необходима для того, чтобы при получении других данных от корреспондента можно было понимать, что данный объект должен быть исключен из процедуры поиска по полям и по уникальному идентификатору.
Варианты идентификации объектов при получении
Порядок автоматического сопоставления объектов при получении, содержится в правилах конвертации объектов (ПКО), предназначенных для получения данных. Правила ПКО находятся в общем модуле
 Рис 3 Разделы общего модуля МенеджерОбменаЧерезУниверсальныйФормат
Рис 3 Разделы общего модуля МенеджерОбменаЧерезУниверсальныйФормат
Отметим, что в общем модуле МенеджерОбменаЧерезУниверсальныйФормат находятся все компоненты (правила обработки данных, правила конвертации объектов и т.д.), определяющие прикладную логику обработки данных в процессе их получения, либо отправки. Программный код этого модуля создается автоматически с помощью приложения “Конвертация данных, редакция 3.0” на основе настроенных правил обмена. Программный код модуля можно создавать вручную, но требует от разработчика большого мастерства.
Вариант автоматического сопоставления (идентификации) объектов при получении задается с помощью свойства ВариантИдентификации ПКО
 Рис 4. Настройки идентификации в модуле менеджера
Рис 4. Настройки идентификации в модуле менеджера
Существуют 3 варианта (3 значения) идентификации объекта
- ПоУникальномуИдентификатору – идентификация по GUID,
- СначалаПоУникальномуИдентификаторуПотомПоПолямПоиска – идентификация по GUID и полям поиска,
- ПоПолямПоиска – идентификация по полям поиска,
Еще одним свойством, определяющим логику сопоставления, является массив полей поиска, определяемый в свойстве ПоляПоиска ПКО.
Алгоритм поиска по полям
Происходит последовательное применение вариантов поиска, заданных в свойстве ПоляПоиска ПКО, используемого при загрузке объекта.
Ограничение.
При сопоставлении на этапе анализа данных применяется только 1-й вариант поиска – ПоУникальномуИдентификатору
Переход к следующему варианту осуществляется в двух случаях:
- У загружаемого объекта не заполнено какое-либо из полей, которое указано в варианте поиска.
- Вариант поиска не дал результата.
Если в загружаемом объекте есть информация об исходном GUID и вариант идентификации для объекта “По GUID” или “По GUID и полям поиска”, то поиск выполняется среди всех объектов заданного типа, кроме тех, для которых в РПИ уже установлены соответствия.
В остальных случаях поиск осуществляется среди всех объектов информационной базы соответствующего типа.
Особенности.
При сопоставлении на этапе анализа данных у загружаемых объектов не проверяется заполнение полей, участвующих в поиске.
На этапе анализа данных соответствие будет установлено только в том случае, когда для одного объекта отправителя был найден один объект получателя.
На этапе загрузки данных соответствие будет установлено и в том случае, когда для одного объекта отправителя нашлось несколько объектов получателя. В такой ситуации соответствие будет установлено с одним из них.
На этапе загрузки данных вариант поиска Номер
+ Дата
для документов работает следующим образом: номер искомого документа проверяется на точное соответствие, дата определяет интервал, в котором проводится поиск по номеру. Сам интервал определяется как период уникальности номеров документа, в который входит указанная дата. Например, если номера документов уникальны в пределах месяца и задана дата 10 декабря 2001 года, то поиск будет проводиться в интервале с 01 по 31 декабря 2001 года.
На этапе анализа данных этот вариант поиска будет работать как обычно: оба поля будут проверяться на точное соответствие.
Вот мое прокомментированное решение в ES3 (подробности после кода):
Object.equals = function(x, y) { if (x === y) return true; // if both x and y are null or undefined and exactly the same if (! (x instanceof Object) || ! (y instanceof Object)) return false; // if they are not strictly equal, they both need to be Objects if (x.constructor !== y.constructor) return false; // they must have the exact same prototype chain, the closest we can do is // test there constructor. for (var p in x) { if (! x.hasOwnProperty(p)) continue; // other properties were tested using x.constructor === y.constructor if (! y.hasOwnProperty(p)) return false; // allows to compare x[ p ] and y[ p ] when set to undefined if (x[ p ] === y[ p ]) continue; // if they have the same strict value or identity then they are equal if (typeof(x[ p ]) !== "object") return false; // Numbers, Strings, Functions, Booleans must be strictly equal if (! Object.equals(x[ p ], y[ p ])) return false; // Objects and Arrays must be tested recursively } for (p in y) { if (y.hasOwnProperty(p) && ! x.hasOwnProperty(p)) return false; // allows x[ p ] to be set to undefined } return true; }
Разрабатывая это решение, я особенно внимательно посмотрел на угловые случаи, эффективность, но пытаясь дать простое решение, которое работает, надеюсь, с некоторой элегантностью. JavaScript допускает, что у нулевых и неопределенных свойств и объектов есть прототипы, которые могут привести к очень разному поведению, если не проверены.
Сначала я решил расширить Object вместо Object.prototype , главным образом потому, что null не может быть одним из объектов сравнения и что я считаю, что null должен быть действительным объектом для сравнения с другим. Есть и другие законные проблемы, отмеченные другими в отношении расширения Object.prototype относительно возможных побочных эффектов для другого кода.
Необходимо проявлять особую осторожность, чтобы разрешить JavaScript, чтобы свойства объекта могли быть установлены как неопределенные , т.е. Существуют свойства, значения которых установлены как неопределенные . Вышеприведенное решение подтверждает, что оба объекта имеют одинаковые свойства, которые не определены для сообщения о равенстве. Это может быть достигнуто только путем проверки существования свойств с использованием Object.hasOwnProperty(property_name) . Также обратите внимание, что JSON.stringify() удаляет свойства, которые установлены как неопределенные , и поэтому сравнения с использованием этой формы будут игнорировать свойства, установленные для значения undefined .
Функции должны считаться равными, только если они используют одну и ту же ссылку, а не только тот же код, потому что это не будет учитывать прототип этих функций. Поэтому сравнение строки кода не работает, чтобы гарантировать, что у них есть один и тот же объект-прототип.
Оба объекта должны иметь одну и ту же цепочку прототипов , а не одни и те же свойства. Это может быть проверено только кросс-браузером, сравнивая конструктор обоих объектов для строгого равенства. ECMAScript 5 позволит проверить их фактический прототип с помощью Object.getPrototypeOf() . Некоторые веб-браузеры также предлагают свойство __proto__, которое делает то же самое. Возможное улучшение вышеуказанного кода позволит использовать один из этих методов всякий раз, когда это возможно.
Использование строгих сравнений здесь имеет первостепенное значение, потому что 2 не следует считать равным "2.0000" , а false должно считаться равным нулю , неопределенным или 0 .
Соображения эффективности приводят к тому, что я как можно скорее сравню для равенства свойств. Затем, только если это не удалось, найдите тип этих свойств. Повышение скорости может быть значительным для больших объектов с большим количеством скалярных свойств.
Не более двух циклов требуется, первый для проверки свойств из левого объекта, второй для проверки свойств справа и проверки только существования (не значения), чтобы поймать эти свойства, которые определены с неопределенным значением.
В целом этот код обрабатывает большинство угловых случаев только в 16 строках кода (без комментариев).
Обновление (8/13/2015) . Я реализовал более эффективную версию, так как функция value_equals() работает быстрее, обрабатывает правильные угловые случаи, такие как NaN и 0, отличные от -0, необязательно применяя порядок и тестирование свойств объектов для циклических ссылок, поддерживаемых более чем 100 автоматическими тесты как часть тестового набора проектов
Материал из Техническое зрение
При решении задачи сравнения изображений важнейшую роль играет иерархический анализ "первичных" особенностей изображений - так называемых "характерных черт". Такие "характерные черты" могут быть использованы для сравнения текущего и эталонного изображений в большом числе методов, например, при иерархической корреляционной обработке, методах голосования, или объемных схемах сравнения. При этом в качестве особенностей изображения используются особые точки, линии, области и структуры (группы особенностей). Рассмотрим кратко подходы, основанные на использовании точечных и контурных особенностей.
Сопоставление на основе точечных особенностей.
Основными достоинствами использования характерных точек для задач обнаружения являются простота и скорость выделения (по сравнению с другими используемыми характерными признаками). Кроме того, на изображениях не всегда удается выделить другие характерные черты (хорошие и четкие контуры или области), в то время как локальные особенности в подавляющем большинстве случаев выделить можно.
Задача обнаружения объекта на изображении сводится к поиску характерных точек и фиксации их взаимного расположения. Эти процедуры выполняются сначала на эталонном изображении, затем на исследуемом, часто в определенной ограниченной области поиска. Общая схема алгоритма поиска соответствующих точек состоит из несколько этапов:
Выделение точечных особенностей на изображениях;
Формирование векторов признаков точек;
Сопоставление точек в пространстве признаков;
Выделение и описание характерных точек на изображении является начальным и ключевым этапом в алгоритме отождествления, от которого зависит результат работы всего алгоритма. Этот этап был рассмотрен ранее в разделе 4.1.
Однако какую бы сложную форму ни имели инварианты, они все равно не в состоянии в $100${\%} случаев уникально охарактеризовать объект. Неоднозначности, то есть случаи, когда разные объекты (точки, области) на изображении характеризуются очень похожими параметрами, могут быть связаны с несовершенством выбранных инвариантов, с низким разрешением или шумом на изображении. Неоднозначности также возникают при наличии на изображении повторяющихся объектов. Один из способов разрешения неоднозначных ситуаций связан с разработкой более качественных инвариантов или иных дескрипторов; это направление очень актуально среди исследователей, занимающихся машинным зрением. Параллельный подход состоит в использовании пространственных соотношений между объектами.
Алгоритмы на основе пространственных отношений, принадлежащие к более высокому уровню обработки, чем растровые алгоритмы, характеризуются более высокой устойчивостью к различным геометрическим и радиометрическим искажениям. Одним из показателей "правильности" найденной пары может служить скопление вокруг точек, образующих такие пары, большого числа других правильно сопоставленных точек. Другим критерием, на основе которого можно отсеивать неверно привязанные
Распределение особых точек
точки, может быть расположение точек относительно прямых. В данном разделе рассматриваются метрический и топологический фильтры, отбраковывающие неверные соответствия, базируясь на взаимном расположении объектов на изображении.
Метрическое сопоставление.
Для того чтобы проверить правильность составления пар кандидатов, привлекается дополнительная информация о взаимном пространственном расположении точек на плоскости изображения. Другими словами, пространственное расположение точек на правом и левом изображении должно быть в определенном смысле схожим. Пространственное расположение может быть описано как матрица расстояний. Рассмотрим набор точек $A_{1}, A_{2}, \ldots, A_{i}, \ldots, A_{N}$ в плоскости изображения (рис. 8).
Расстояния между точками могут быть записаны в виде матрицы расстояний $\vert \vert r_{ij}\vert \vert $ следующим образом:
\[ {\begin{array}% & {A_1 } & {A_2 } & {...} & {A_i } & {...} & {A_N } \\ \hline {A_1 } & 0 & {r_{12} } & {...} & {r_{1i} } & {...} & {r_{1N} } \\ {A_2 } & & 0 & {...} & {r_{2i} } & {...} & {r_{2N} } \\ {...} & & & {...} & {...} & {...} & {...} \\ {A_i } & & & & 0 & {...} & {r_{iN} } \\ {...} & & & & & {...} & {...} \\ {A_N } & & & & & & 0 \\ \end{array} } \]
где $r_{ik} =\sqrt {(x_i -x_k)^2-(y_i -y_k)^2} $ - евклидово расстояние между $A_{i}$ и $A_{k}$, $x_{i}$, $y_{i}$ - координаты точки $A_{i}$ на изображении, $x_{k}$, $y_{k}$ - координаты точки $A_{k}$ на изображении.
Для проверки правильности формирования сопряженных пар точек сравниваются матрицы расстояний левого $\vert \vert r_{ij}^{L}\vert \vert $ и правого $\vert \vert r_{ij}^{R}\vert \vert $ изображений. Для количественной оценки ошибочного связывания вводится переменная $\delta _{ij}$,
$$ \delta _{ij} = r_{ij}^{R} - r_{ ij}^{L}. $$
Анализ гистограммы распределения $\delta _{ij}$ позволяет оценить величину порога отбраковки ошибочных пар $\Delta $ согласно критерию, описанному ниже. Заметим, что точка с номером $i$ имеет $N-1$ связей, причем соответствующие расстояния в матрице $\vert \vert r_{ij}\vert \vert $ суть: $r_{1i}$, $r_{2i},{\ldots}, r_{ii}$, $r_{i,i+1},{\ldots},r_{i,N}$. Соответственно, вектор расстояний, ассоциированный с парой номер $i$ есть $$ \delta_{i}=\{\delta _{1i}, \delta _{2i},{\ldots}, \delta _{ii}, \delta _{i,i+1},{\ldots}, \delta _{i,N}\} $$ где $$ \vert \vert \delta _{i}\vert \vert = \min\{\delta _{1i}, \delta _{2i},{\ldots}, \delta _{ii}, \delta _{i,i+1},{\ldots}, \delta _{i,N}\}$$ - норма вектора $\delta_{i}$.

Отфильтрованные пары точек
Пара сопряженных точек принимается, если $\vert \vert \delta _{i}\vert \vert < \Delta $ и отклоняется в противоположном случае. Процедура проверки выполняется для каждого $i$ от $1$ до $N$. Существенно, что предложенный критерий отбора на основе анализа матрицы (5) инвариантен к вращению изображений.
Для того чтобы сделать алгоритм более эффективным, используется пирамида изображений. Начальное приближение для точек интереса находится на верхнем уровне пирамиды и затем уточняется на следующих уровнях с использованием корреляции. Пример работы алгоритма при сопоставлении двух тестовых видеокадров представлен на рис. 9.
Топологическое сопоставление.
Рассмотрим тройку объектов $\langle R_1^1 ,R_1^2 ,R_1^3 \rangle$ на изображении $V_1 $ и соответствующую ей тройку объектов $\langle R_2^1 ,R_2^2 ,R_2^3 \rangle$ на изображении $V_2 $. Под объектом понимается область изображения, например "интересная точка" (скажем, угол либо локальный экстремум яркости) и ее окрестность, либо область более сложной формы.
Пусть $c_v^i =\langle x_v^i ,y_v^i \rangle$ - центр объекта (области) $R_v^i $. Функция
$$ \begin{gather}\tag{1} \textrm{side} (R_v^1 ,R_v^2 ,R_v^3)= \textrm{sign} \left(\det \left[ {{\begin{array}{*{20}c} {x_v^3 -x_v^2 } & {x_v^1 -x_v^2 } \\ {y_v^3 -y_v^2 } & {y_v^3 -y_v^2 } \\ \end{array} }} \right] \right) \end{gather} $$
принимает значение $-\mbox{}1$, если $c_v^1 $ лежит по правую сторону от вектора, направленного из $c_v^2 $ в $c_v^2 $, или значение 1, если эта точка лежит по левую сторону от него. Таким образом, уравнение
$$ \begin{gather}\tag{2} \textrm{side}(R_1^1 ,R_1^2 ,R_1^3)=\textrm{side}(R_2^1 ,R_2^2 ,R_2^3) \end{gather} $$ означает, что точка $c^1$ лежит по ту же сторону от вектора на обоих изображениях. Если для некоторой точки равенство (9) не выполняется, будем говорить, что точка нарушает отношение сторонности. Такое происходит в случае, когда по крайней

Отношение сторонности - - точка $c^1$ должна лежать по одну и ту же сторону (здесь - по левую) от направленного отрезка из $c^2$ в $c^3$ в обоих изображениях
мере один из трех объектов неверно привязан к своему аналогу в другом изображении или же если объекты не компланарны и имеется сдвиг камеры в направлении, перпендикулярном трехмерной плоскости, содержащей их центры. В последнем случае точка может передвинуться на другую сторону от вектора (то есть изменится ее параллакс), однако такое случается лишь с небольшим числом троек. Точки $R_v^1 $, $R_v^2 $ и $R_v^3 $ удовлетворяют равенству (9) или нарушают его вне зависимости от порядка, в котором они появляются в тройке; необходимо лишь, чтобы в обоих изображениях они были пронумерованы в одинаковом циклическом порядке (по часовой стрелке или против часовой стрелки). На рис. 10 изображены тройки соответствующих точек, удовлетворяющих соотношению (9).
Когда равенство (9) нарушается, можно сделать вывод о неверной привязке одного из объектов тройки, но на данном этапе неясно, какого именно. Одной тройки для такого вывода недостаточно, однако, рассмотрев все возможные тройки, можно найти объекты, которые с большей вероятностью, чем остальные, привязаны неверно. Основная идея метода, предложенного в заключается в том, что неверно сопоставленные объекты чаще нарушают отношение сторонности.
Равенство (9) проверяется для всех троек областей $\langle R^i,R^j,R^k\rangle,R^i,R^j,R^k\in \Phi _{12}$, где $\Phi _{12} $ - множество областей, присутствующих как на изображении $V_1 $, так и на изображении $V_2 $. Пусть $\Phi =\left\{ {i\vert R^i\in \Phi _{12} } \right\}$. В начале алгоритма подсчитывается штраф $$ \begin{gather}\tag{3} h(i)=\sum\limits_{j,k\in \Phi \backslash i,j>k} {\left| {\textrm{side}(R_1^i ,R_1^j ,R_1^k)-\textrm{side}(R_2^i ,R_2^j ,R_2^k)} \right|} , \end{gather} $$ то есть количество раз, когда объект $R^i$ нарушает отношение сторонности (9), для всех $i\in \Phi $. Затем штраф нормируется на максимальное количество всех возможных нарушений:
$$ \begin{gather}\tag{4} h_N (i)=\frac{h(i)}{(n-1)(n-2)}, \quad n=\left| \Phi \right|. \end{gather} $$
Исходя из (11), получаем, что $h_N (i)\in $. Пользователем выбирается порог $t_{\textrm{topo}} \in $. Проанализировав штраф для всех объектов, определяется объект $R^w$, где $w=\arg \max _i h_N (i)$, нарушивший отношение (9) чаще других. Если $h_N (w)>t_{\textrm{topo}} $, то объект $R^w$ (то есть пара объектов $R_1^w ,R_2^w)$ считается неверно привязанным и удаляется из множества $\Phi .$ На каждой итерации штраф $h_N (i)$ пересчитывается на основе оставшихся в $\Phi $ объектов и наиболее часто нарушающие отношение (9) пары удаляются. Процесс продолжается до тех пор, пока есть объекты для удаления, то есть пока максимальное значение штрафа на оставшихся объектах не станет меньше порога $t_{\textrm{topo}}$.
Во время первых итераций, пока в множестве $\Phi $ имеется достаточно много кандидатов на удаление, даже верно привязанные объекты могут иметь высокое значение штрафа. Однако у неверно привязанных объектов штраф будет еще выше. После удаления наихудшей пары объектов, $h_N (i)$ для оставшихся объектов уменьшится. Когда останутся только правильно привязанные пары объектов, небольшие изменения параллакса по-прежнему будут давать ненулевые значения штрафа.
Величина порога $t_{\textrm{topo}}$ влияет на количество оставшихся после топологической фильтрации объектов. Нулевое значение порога приводит к тому, что остается небольшое число объектов, но все они полностью удовлетворяют топологическому отношению сторонности. Такой выбор порога разумен на относительно плоских изображениях с малой глубиной. В большинстве случаев следует иметь в виду, что малое значение порога приводит к нежелательному эффекту ошибочного удаления ряда точек/областей как неверно привязанных. Исходя из многочисленных экспериментов с наземными и аэрофотоснимками, наиболее желательно выбирать порог $t_{\textrm{topo}}$ из диапазона [$0{,}03$, $0{,}15$].
Проиллюстрируем работу алгоритма на примере. Пусть некоторым алгоритмом найдено и привязано друг к другу $50$ пар точек (рис. 11). На глаз можно определить, что ряд точек привязан друг к другу неправильно, то есть точки, помеченные одним номером, находятся в разных местах левого и правого изображений.
Теперь пропустим координаты пар точек через топологический фильтр с $t_{\textrm{topo}} =0{,}15$ - останется $21$ пара точек (рис. 12). Если же применить более строгую

Найдено и привязано друг к другу $50$ пар точек. Примерно 2/3 соответствий являются ложными

После применения топологического фильтра с $t_{\textrm{topo}} =0{,}15$ $29$ пар точек удалено как ложные соответствия, осталась $21$ пара

После применения топологического фильтра с $t_{\textrm{topo}} =0{,}05$ $34$ пары точек удалено как ложные соответствия, осталось $16$ пар
фильтрацию с $t_{\textrm{topo}} = 0{,}05$, то останется $16$ пар точек (рис. 13), причем все соответствия являются верными. Никакие верные соответствия удалены не были, причем данный метод успешно отфильтровал $34$ пары, что означает, что $68\%$ исходных соответствий были ложными.
Как видно, метод топологической фильтрации не столь чувствителен к точной пространственной локализации точек. Главный акцент в методе делается именно на взаимное расположение точек на изображении.
Вычислительная сложность метода зависит от количества неверно привязанных пар и, в большей степени, от исходного числа пар привязанных объектов. Наибольшая часть вычислений приходится на вычисление определителя в формуле (8) для проверки всех возможных троек объектов. В исходном наборе из $\left| \Phi \right|=n$ пар-кандидатов необходимо проверить $C_n^3 =\frac {n(n-1)(n-2)} {6}$ троек, так что итоговая сложность алгоритма составляет $O(n^3)$, что довольно много, и это один из недостатков метода. По мере отбраковки объектов число всевозможных троек уменьшается, и для ускорения работы можно в формуле (10) не пересчитывать штрафы заново, а подсчитать только те слагаемые, в которые входил удаленный объект, и затем вычесть эти слагаемые из выражения для $h(i)$.
Необходимо отметить, что данный метод плохо справляется с ситуациями, когда на изображении присутствует ярко выраженный передний и задний план. Например, если большинство областей находится на переднем плане, то области заднего плана будут часто нарушать отношение сторонности (9) в силу некомпланарности с областями переднего плана. Часть правильных областей в таком случае будет отбракована.
Сопоставление на основе контурных особенностей.
Основным недостатком точечных особенностей является неустойчивость к радиометрическим изменениям изображения. В то же время на реальных изображениях этот вид искажений встречается достаточно часто: блики, тени и другие эффекты, связанные с изменением условий освещения, времени или сезона съемки. Другим недостатком точечных особенностей является их неустойчивость к ракурсным искажениям. Этот вид искажений также встречается во многих задачах, представляющих практический интерес. Поэтому возникает необходимость привлечения информации о форме самого объекта как наиболее устойчивой к изменениям такого рода, для решения задач координатно-плановой привязки. Форма объекта, безусловно, является наиболее устойчивой его характеристикой. Одна из сложностей поставленной задачи заключается в том, что на практике достаточно распространены случаи сезонных изменений формы естественных (леса, водоемы) и искусственных объектов (дороги), не связанных с радиометрическими искажениями. Отсутствие априорной информации о моделях сезонных изменений форм объектов существенно затрудняет решение данной задачи.
С интуитивной точки зрения форма объекта во многом определяется его границами. На плоском изображении границами являются контуры. Исследования психологов показывают, что мозг человека при распознавании изображений в наибольшей степени опирается именно на контурную информацию. Контуры более устойчивы к изменениям освещенности, ракурсным искажениям, они инвариантным к повороту и изменениям масштабов. К достоинствам контурного представления также можно отнести значительное уменьшение объема информации, обрабатываемой при сравнении двух или нескольких изображений, за счет того, что контурные точки составляют небольшую часть всех точек на изображении.
В данном разделе под контурами понимаются резкие перепады яркости на изображениях. В процессе использования контурной информации для автоматического сопоставления (привязки) изображений можно выделить четыре основных этапа:
- выделение контурных точек;
- прослеживание контуров;
- описание контуров;
- сравнение контуров в выбранном признаковом пространстве.
Методы выделения контурных точек уже были ранее подробно рассмотрены в разделе 3.4. Задачи прослеживания и описания контуров обсуждались в разделе 4.1. Рассмотрим теперь задачу сравнения контуров.
Одной из ключевых проблем при сравнении контуров на двух цифровых изображениях является выбор атрибутов, определяющих индивидуальные особенности контура. При этом можно выделить несколько основных типов признаков: метрические (длина, ширина, ориентация, угол), аналитические (параллельность, прямолинейность, кривизна), топологические (вложенность, соседство, пересечение, примыкание, наложение). На практике используется достаточно большое число атрибутов контура: длина, кривизна, площадь, периметр, число и положение особых точек, показатель компактности, положение центра тяжести. Для создания более надежных алгоритмов распознавания целесообразно использование комбинаций признаков различных типов.
Заметим также, что на реальных изображениях не всегда удается выделить достаточное число замкнутых контуров. Поэтому для задачи идентификации контуров лучше использовать атрибуты, не зависящие от свойств замкнутости контура.
В зависимости от выбранных атрибутов используются различные методы сравнения контуров.
Сравнение контуров в естественном представлении.
Пусть эталонное изображение содержит $N$ различных контуров $i=1 ,\ldots, N$, тогда $C_L ^i$ - $i$-й контур длинной $l_L ^i$. Область поиска на другом изображении содержит $M$ различных контуров $j=1 ,\ldots, M$, тогда $C_R ^j$ - $j$-й контур области поиска длиной $l_R ^j$. $C_L ^i$ и $C_R ^j$ представлены функциями кривизны (перегиба) $K_L (l)$ и $K_R (l)$ соответственно.
Для решения поставленной задачи может быть использована процедура сравнения двух контуров, суть которой заключается в последовательном перемещении функции $K_{\textrm{Э}}(l)$ (контура $C_{\textrm{Э}}$) по функции $K_{\textrm{ОП}}(l)$ (контура $C_{\textrm{ОП}}$), и в каждом текущем положении вычисляется значение нормированного коэффициента корреляции $$ k(m, C_{\textrm{Э}} , C_{\textrm{ОП}}) = \frac {\sum\limits_{i=1}^{l_\textrm{Э}} {\left({K_{\textrm{Э}} \left({l_i } \right)-\bar {K}_{\textrm{Э}} } \right)\left({K_{\textrm{ОП}} \left({l_{i+m} } \right)-\bar {K}_{\textrm{ОП}} ^m} \right)} }{\sqrt {\sum\limits_{i=1}^{l_{\textrm{Э}} } {\left({K_{\textrm{Э}} \left({l_i } \right)-\bar {K}_{\textrm{Э}} } \right)^2} } \sqrt {\sum\limits_{i=1}^{l_{\textrm{Э}} } {\left({K_{\textrm{ОП}} \left({l_{i+m} } \right)-\bar {K}_{\textrm{ОП}}^m} \right)^2} } }, $$ где $m=1 ,\ldots, l_{\textrm{ОП}} -l_{\textrm{Э}} $; $K_{\textrm{Э}} (l)$ - - функция кривизны $C_{\textrm{Э}} $ контура; $K_{\textrm{ОП}} (l)$ - - функция кривизны $C_{\textrm{ОП}}$ контура; $\bar {K}_{\textrm{Э}} $, $\bar {K}_{\textrm{ОП}} ^m$ - - средние значения интенсивности кривизны контура $C_{\textrm{Э}} $ и фрагмента контура $C_{\textrm{ОП}} $ соответственно.
При этом необходимо, чтобы выполнялось следующее условие: $l_{\textrm{Э}} Фиксируется положение, при котором достигается максимальное значение
коэффициента корреляции, при этом паре контуров $C_{\textrm{Э}} $ и $C_{\textrm{ОП}}$ ставится в
соответствие значение коэффициента корреляции в данном положении. После того как коэффициенты корреляции найдены для всех контуров области
поиска, необходимо выбрать пару контуров ($C_{L } ^i$ и $C_R ^j)$, для
которых коэффициент корреляции принимает максимальное значение. Однако
максимальное значение коэффициента в ограниченной области поиска не
гарантирует достоверности результата, поэтому необходимо использовать
дополнительную информацию о взаимном расположении контуров. Использование
такой информации позволяет выявлять ложные отождествления. В данной работе для проверки достоверности отождествления были использованы
расстояния между центрами тяжести контуров, при этом найденные пары контуров
($C_{L}^i$, $C_R^j)$ и ($C_{L}^l$, $C_R ^m)$ можно считать
правильными, если
$$
\left| {L_{i,l} -L_{j,m} } \right|\le \Delta ,
$$
где $L_{i,l} $ - - расстояние между центрами тяжести контуров $C_{_L } ^i$ и
$C_{_L } ^l$; $L_{j,m} $ - - расстояние между центрами тяжести контуров $C_R
^j$ и $C_R ^m$. Данная схема отождествления кривых не позволяет сравнивать прямолинейные
отрезки контура между собой, что, безусловно, является недостатком метода.
Это связано с тем, что при сравнении любых двух отрезков коэффициент
корреляции будет принимать значения, близкие к единице. Такая особенность
корреляции функции кривизны требует введения дополнительных условий
фильтрации. Из множества контуров, выделенных на изображении, должны быть
исключены все прямолинейные отрезки. Пусть для контура $C_{\textrm{Э}}^i$ эталонного изображения каким либо способом
найдено $N_{\textrm{Э}} $ особых точек, а для контура $C_{\textrm{ОП}}^j$ из области поиска
найдено $N_{\textrm{ОП}} $ точек. При этом сама область поиска $C_{\textrm{Э}}^i$ содержит $N$
контуров. Тогда любой контур $C^i$ можно представить в виде функции $F^i (l)$,
принимающей значения, отличные от нуля только в найденных
характерных
точках контура. Причем если при сравнении контуров используется
только взаимное расположение точек, то значения функции в особых точках
можно положить равным единице (рис. 14). Представление контура в виде функции $F(l)$ Необходимо для каждого контура $C_L ^i$ эталонного изображения найти
соответствующие контуры $C_R ^j$ из области поиска. Для решения поставленной задачи используется процедура сравнения двух
контуров, суть которой заключается в последовательном совмещении точки $i$
контура $C_{\textrm{Э}} $ ($i=1,\ldots, N_{\textrm{Э}})$ и $j$ точки
контура $C_{\textrm{ОП}} $ ($j=1, \ldots, N_{\textrm{ОП}})$.
При этом необходимо, чтобы выполнялось условие $l_{\textrm{Э}} В каждом фиксированном положении определяется число соответствующих точек,
для которых выполняется условие \begin{gather*}
F_{\textrm{Э}} (l_{\textrm{Э}} ^i+\Delta _m)=F_{\textrm{ОП}} (l_{\textrm{ОП}} ^j+\Delta _m)\ne 0,\\
\Delta _m =l_{\textrm{Э}} ^{i+m}-l_{\textrm{Э}} ^i, \quad m=1 ,\ldots, N_{\textrm{Э}} -i.
\end{gather*}
В результате выполнения $N$ операций сравнений контуров необходимо выбрать
контур $C_{\textrm{ОП}} ^\ast $, содержащий максимальное число соответствующих точек.
Однако для сокращения числа ложных отождествлений необходимо ограничить
снизу максимальное число найденных соответствующих точек. Контуры $C_{\textrm{Э}} ^i$ и
$C_{\textrm{ОП}} ^\ast $ считаются соответствующими, если число найденных точек
больше определенного порога $T$. Данный способ сравнения является одним из самых быстрых и не требует
вычислений дополнительных характеристик в точках, однако надежность такого
алгоритма невысока. Неустойчивость работы алгоритма связана с тем, что для
реальных данных
$$
F_{\textrm{Э}} (l_{\textrm{Э}}^i+\Delta_m)=F_{\textrm{ОП}} (l_{\textrm{ОП}}^j+\Delta _m \pm \Delta E_m)\ne 0,
$$
где $\Delta E_m $ - величина погрешности, обусловленная дискретностью
исходных данных и влиянием различных шумов. Альтернативным способом поиска соответствующих точек на двух контурах
является схема, при которой для сравнения используются не яркостные, а
геометрические особенности объекта, и все характеристики вычисляются не по
двумерной функции интенсивности $I(x,y)$, а по одномерной функции $F(l)$.
Алгоритм поиска соответствующих точек состоит из трех основных этапов: В качестве атрибутов точек используются следующие характеристики:
$M_{0}$, $D$, коэффициент асимметрии. Коэффициент асимметрии
вычисляется по формуле
$$
a=\frac{{\bar M}_3 }{\sigma ^3},
$$
где ${\bar M}_3 $ - центральный момент третьего порядка. В отличие от предыдущего метода, задача идентификации точек решается при
помощи геометрического поиска в многомерном пространстве признаков. Для
указанных атрибутов мера сходства точек в пространстве признаков будет
иметь вид
$$
S_{ij} =\frac{\vert M^{\textrm{Э}}_{0i} -M^{\textrm{ОП}}_{0j} \vert }{M_{0\max} -M_{0\min}}
+\frac{\vert D^{\textrm{Э}}_i -D^{\textrm{ОП}}_j \vert }{D_{\max} -D_{\min} }
+\frac{\vert a^{\textrm{Э}}_i -a^{\textrm{ОП}}_j \vert }{a_{\max} -a_{\min} }
$$
Поиск соответствующих точек заключается в определении пары точек $\langle i,j \rangle$,
$i\in C_{\textrm{Э}} $, $j\in C_{\textrm{ОП}} $, для которой $S_{ij} $ принимает наименьшее
значение в области поиска контура. Данный алгоритм отождествления точек является более надежным. Это связано с
тем, что для проверки достоверности использовалось евклидово расстояние
между точками.Сравнение характерных точек контура.